Precisión de las cámaras de infrarrojos y su incertidumbre en lenguaje sencillo

Resulta difícil confiar en las mediciones de instrumentos si no se tiene claro de dónde provienen su sensibilidad y su precisión, y esto les pasa a menudo a las cámaras de infrarrojos. Además, para hablar de la precisión de las mediciones de las cámaras de infrarrojos, muchas veces se acude a términos complejos y a un argot que resulta confuso y extraño. Esto puede provocar que al final muchos investigadores prefieran evitar este tipo de herramientas. Pero, si lo hacen, dejarán escapar las potenciales ventajas de la medición térmica para aplicaciones de I+D. En el siguiente debate, dejamos a un lado los términos técnicos y explicamos la incertidumbre de la medición en lenguaje sencillo, proporcionándole una base que le ayudará a entender la calibración y la precisión de las cámaras de IR.
Especificaciones de precisión de la cámara y ecuación de incertidumbre
Habrá notado que la mayoría de hojas de datos de cámaras de IR muestran una especificación de precisión como ±2 °C o 2 % de la lectura. Esta especificación es el resultado de una técnica de análisis de incertidumbre muy utilizada denominada «raíz de la suma de los cuadrados» o RSS. La idea es calcular los errores parciales de cada variable de la ecuación de medición de la temperatura, elevar al cuadrado cada término de error, sumarlos todos y hacer la raíz cuadrada. Aunque esta ecuación parece compleja, es bastante directa. Determinar los errores parciales, por otro lado, puede resultar complicado.
Los «errores parciales» pueden ser el resultado de diferentes variables en la ecuación de medición de la temperatura típica de la cámara de IR, lo que puede incluir:
- Emisividad
- Temperatura ambiente reflejada
- Transmitancia
- Temperatura atmosférica
- Respuesta de la cámara
- Precisión de temperatura del calibrador (cuerpo negro)
Una vez determinados valores razonables para los «errores parciales» para cada uno de los términos anteriores, la ecuación de errores global será así:
![]()
Donde ΔT1, ΔT2, ΔT3, etc. son los errores parciales de las variables en la ecuación de medición.
¿Por qué hacer esto? Resulta que en ocasiones los errores aleatorios se acumulan en la misma dirección, alejándole del valor real, mientras que otras veces, se acumulan en la dirección opuesta y terminan por cancelarse entre sí. Tomar el RSS le ofrece un valor más adecuado para la especificación de error general. Esta viene siendo la especificación mostrada en las hojas de datos de FLIR.
Vale la pena mencionar que los cálculos mencionados hasta ahora solo solo son válidos si la cámara se está utilizando en el laboratorio o a corta distancia (menos de 20 metros) en el exterior. Distancias más largas introducirán incertidumbre en la medición debido a la absorción atmosférica y, en menos medida, a su emisión. Cuando un ingeniero de I+D realiza un análisis de RSS para prácticamente cualquier sistema moderno de cámara de IR en condiciones de laboratorio, el número resultante ronda los ±2 °C o el 2 %, lo que hace que sea un índice de precisión razonable para utilizarlo en las especificaciones de una cámara.
Sin embargo, la práctica muestra que las cámaras de alto rendimiento, como la FLIR X6900sc, ofrecen muchos mejores resultados que cámaras económicas, como la FLIR E40, así que aún nos queda trabajo por hacer para explicar esta observación.
Mediciones de laboratorio y ±1 °C o 1 % de lectura
En esta sección, echaremos un vistazo a las mediciones de temperatura que produce realmente una cámara al observar un objeto de una emisividad y una temperatura conocidas. Un objeto así suele conocerse como «cuerpo negro». Puede que haya oído este término antes para hacer referencia al concepto teórico de un objeto con emisividad y temperatura conocidas. También se utiliza para describir una pieza de equipo de laboratorio que emula bastante bien este concepto. Se muestra a continuación el laboratorio de calibración de FLIR con un cuarto de círculo de al menos dos cuerpos negros con cavidad.

Las mediciones en laboratorio de la incertidumbre implican orientar una cámara calibrada hacia un cuerpo negro calibrado y trazar la temperatura durante un periodo de tiempo. A pesar de las cuidadosas calibraciones, siempre habrá algo de error aleatorio en la medición. En los datos resultantes pueden cuantificarse la precisión y la exactitud. La figura 2, más abajo, muestra los resultados de la medición de cuerpos negros calibrados.
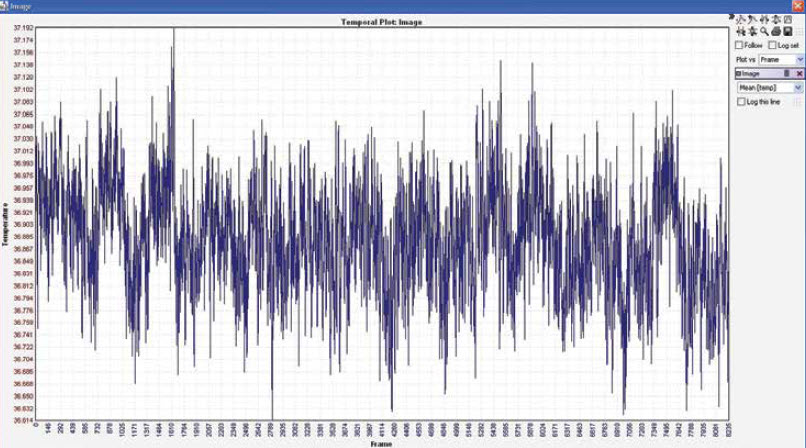
El trazado que se ve a continuación muestra más de dos horas de datos de una cámara FLIR A325sc observando un cuerpo negro a 37 °C a una distancia de 0,3 m en un entorno interior. La cámara registró la temperatura una vez por segundo. Los datos trazados son la media de todos los píxeles de la imagen. Un histograma de estos datos lo dejarían más claro, pero la mayoría de los puntos estaban comprendidos entre los 36,8 y los 37 °C. Las temperaturas de rango más amplio registradas fueron 36,6 y 37,2 °C.
Observando estos datos, podríamos caer en la tentación de afirmar que la precisión prevista es de 0,5 °C para la media de todos los píxeles. Podría hasta afirmarse que es de ±1 °C para la FLIR A325sc y cualquier otra cámara que utilice el mismo detector. Sin embargo, también podría plantear que el gráfico anterior muestra una media de todos los píxeles y que no pueden ser representativos de un píxel en particular.
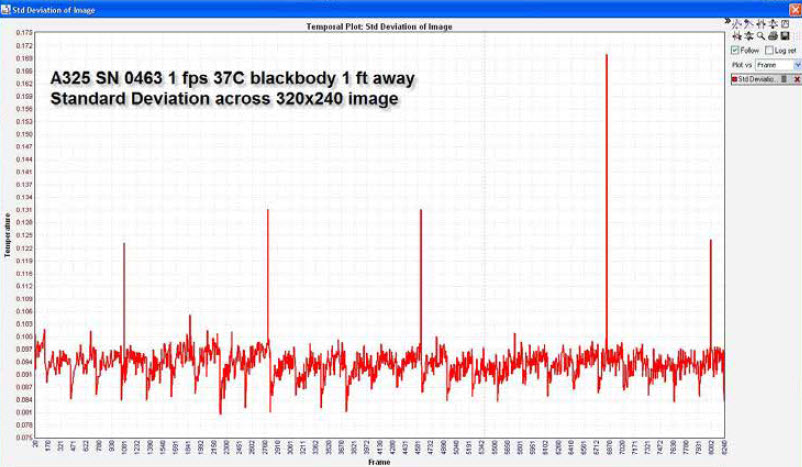
Una manera de saber hasta qué punto concuerdan entre sí todos los píxeles es observar la desviación estándar frente al tiempo. Esto se representa en la figura 3. El gráfico muestra que la desviación estándar típica es de menos de 0,1 °C. Los picos ocasionales de alrededor de 0,2 °C son el resultado de la actualización en un punto de la cámara, un tipo de procedimiento de autocalibración que todas las cámaras basadas en microbolómetro deben realizar periódicamente.
Hasta ahora, hemos hablado de la recopilación de datos desde cámaras de microbolómetro no refrigerado. ¿Cómo diferirán los resultados para una cámara con detector cuántico de alto rendimiento?
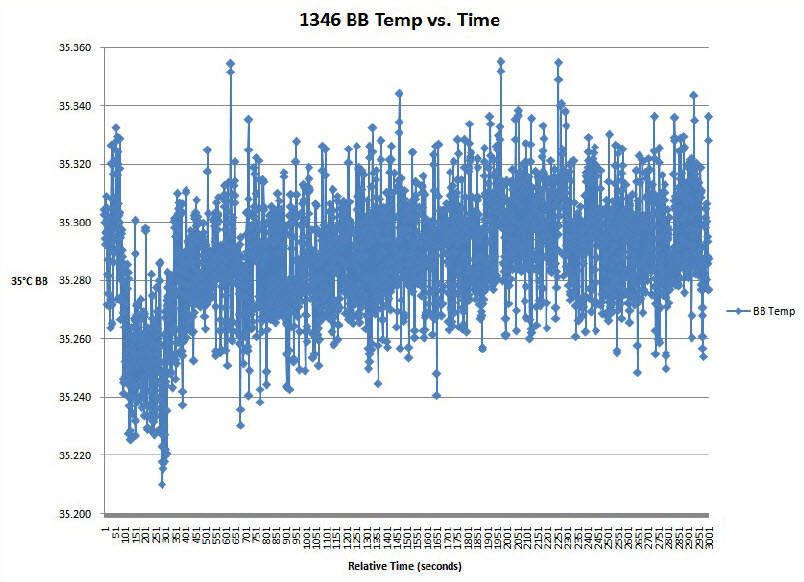
La figura 4 muestra la respuesta de una cámara de 3‐5 μm típica con un detector de antimoniuro de indio (InSb), como la FLIR X6900sc. La documentación de la cámara muestra la precisión sometida a prueba a ±2 °C o al 2 %. En el gráfico que se muestra a continuación, puede verse que los resultados están comprendidos en esas especificaciones: la lectura de precisión ese día fue de alrededor 0,3 ° y la lectura de exactitud, de alrededor de 0,1 °C. ¿Pero por qué está el error de compensación a 0,3 °C? Esto podría deberse a la calibración del cuerpo negro, la calibración de la cámara o cualquiera de los términos de error parcial mencionados en la sección 2. Otra posibilidad es que la cámara aún estuviera calentándose al principio de la medición. Si la óptica o el interior del cuerpo de la cámara están cambiando de temperatura, pueden desviar la medición de la temperatura.
La conclusión que podemos extraer de estas dos pruebas de calibración es que tanto las cámaras de microbolómetro como las cámaras con detector cuántico y recuento de fotones pueden venir calibradas de fábrica para proporcionar precisiones de menos de 1 °C al observar objetos de 37 °C de emisividad conocida en condiciones ambientales típicas de interior.
Compensación de temperatura ambiente
Uno de los pasos más importantes de las calibraciones de fábrica es la compensación de temperatura ambiente. Las cámaras de infrarrojos, ya sean térmicas o con detector cuántico, responden a la energía de infrarrojos total que llega al detector. Si la cámara está bien diseñada, la mayoría de esta energía provendrá de la escena: un porcentaje muy pequeños de los resultados provienen de la propia cámara. Sin embargo, es imposible eliminar completamente la contribución de los materiales que rodean al detector y al recorrido óptico. Figura 2: Respuesta de una cámara FLIR A325sc típica al observar un cuerpo negro a 37 °C Figura 3: Desviación estándar de una A325sc típica al observar un cuerpo negro a 37 °C Figure 4: Respuesta de una cámara InSb típica al observar un cuerpo negro a 35 °C. Sin una adecuada compensación, cualquier cambio en la temperatura del cuerpo de la cámara o de las lentes alterará de manera significativa las lecturas de temperatura que proporciona la cámara.
El mejor método para conseguir la compensación de la temperatura ambiente es medir la temperatura de la cámara y del recorrido óptico hasta en tres ubicaciones diferentes. Los datos de medición se incluyen entonces en la ecuación de calibración. Esto puede asegurar lecturas precisas en todo el rango de temperaturas operativas (típicamente, de -15 a 50 °C). Esto es particularmente importante para cámaras que van a utilizarse en exteriores o que vayan a estar sometidas de alguna otra forma a vaivenes térmicos.
Incluso con la compensación de temperatura ambiente, es importante permitir que la cámara se caliente del todo antes de realizar mediciones importantes. Además, aparte la cámara y la óptica de la luz solar directa o de otras fuentes de calor. Cambiar la temperatura de la cámara y de la óptica tendrá efectos negativos en la incertidumbre de precisión.
Cabe destacar que no todos los fabricantes de cámaras inducen la compensación de temperatura ambiente en su proceso de calibración. Al no compensar correctamente la deriva de temperatura ambiente, los datos de estas cámaras podrían mostrar imprecisiones significativas (de hasta 10 °C o más). Por tanto, asegúrese de preguntar sobre las calibraciones y de cómo se han realizado antes de invertir en una cámara de IR.
Otras consideraciones de medición
Aunque no están directamente relacionadas con la calibración de la cámara, consideraciones como la emisividad y el tamaño de punto pueden afectar a la precisión de la cámara. Una emisividad incorrecta o unas condiciones de prueba inadecuadas afectarán a la capacidad de la cámara de medir su objetivo correctamente.
Emisividad (o capacidad de un objeto para emitir, más que reflejar, energía de infrarrojos) debe tenerse en cuenta correctamente. Esto implica dedicar tiempo a determinar la emisividad del objetivo introducir esa información en la cámara. También implica prestar atención a si el objetivo es completamente reflectante y dar pasos para resolver eso (p. ej. recubriendo la superficie con pintura no reflectante) antes de medir. Todas las cámaras FLIR proporcionan un medio de definir una emisividad adecuada. Si comete un error, todo el software de I+D de FLIR le permite cambiar la emisividad durante el análisis (visionando en directo o después del análisis). Normalmente, puede hacerse en una imagen o región completa por regiones.
Otro factor para considerar es el tamaño de punto o cuánta área cubre cada píxel en el objetivo. Pongamos que una A325sc con una lente predeterminada de 25 grados está midiendo una cerilla encendida a 20 metros de distancia. Cada píxel cubre un área de unos 16 centímetros cuadrados de la escena total. Pero la cabeza de una cerilla solo tiene unos 0,8 centímetros: mucho menos de lo que está cubriendo el píxel. Casi toda la energía de infrarrojos que llega al píxel viene en realidad de la zona que hay detrás del ascua de la cerilla. Solo 1/64 de la contribución proviene el ascua que queremos medir. Si el fondo está a temperatura ambiente, la cámara ofrecerá una temperatura mucho más baja del ascua que la real.
La solución sería conectar una óptica telescópica a la cámara o simplemente acercarse al objetivo. Cualquiera de las dos cosas acercaría el tamaño de píxel a una relación 1:1 con el ascua. Si queremos acercarnos lo más posible a una precisión de temperatura absoluta, debemos asegurarnos de que el objeto de interés más pequeño esté totalmente subtendido por una red de al menos 10 x 10 píxeles. Sin embargo, hasta considerando que el tamaño de punto sea un solo píxel o una red de 3 x 3 píxeles, le acercará mucho a la medición real.
Conclusión
Como hemos visto, la técnica de análisis de incertidumbre RSS nos permite determinar la precisión de cámaras de infrarrojos u que estas cámaras pueden tener, como mucho, un margen de error de 2 °C. Con una calibración adecuada y atendiendo bien a factores como la temperatura ambiente, la emisividad y el tamaño de punto, el margen posible de error puede ser inferior a 1 °C.
Una nota final: la información presentada en esta documentación se redactó principalmente teniendo en mente cámaras de infrarrojos calibradas en fábrica. Aunque la física es aplicable a las calibraciones de usuario, las herramientas y los métodos necesarios para las calibraciones de usuario varían en función del sistema del que se hable. Además, poder realizar una buena calibración de usuario le permitiría realizar un análisis de incertidumbre personalizado, haciendo que las especificaciones generalizadas tratadas en este documento resulten menos relevantes.
Artículos relacionados
-
 Conceptos fundamentales
Conceptos fundamentales
¿Qué es el Modo de alta sensibilidad?
Más información -
 Nota técnica
Nota técnica
Las cámaras de visión artificial FLIR registran imágenes de alta definición del aterrizaje del rover Perseverance en Marte
Lea la historia -
 Historia de la aplicación
Historia de la aplicación
Investigadores estudian glaciares en retroceso mediante imágenes térmicas de drones
Lea la historia